Управляемая совместная тренировка для попиксельного полуконтролируемого обучения.
После появления нейронных сетей особенно глубоких, основная проблема “где найти размеченный датасет для решаемой задачи?”. Особенно остро такая проблема стоит во всевозможных задачах компьютерного зрения. И если для детектирования и классификации изображений разметка датасета штука крайне недешевая, то для семантической сегментации, удаления шума и прочих удалений отражений разметка датасета может стоить просто дико дорого.
Поэтому приходится каким-то образом ловчить и приспосабливаться. Можно, например, генерировать синтетический датасет (это хорошо получается, если учесть развитие всевозможных игровых движкоd), и тренировать сетку на нем, одновременно, решая задачу domain adaptation, согласуя синтетические данные с реальными.
Другой подход - это так называемое полуконтролируемое обучение (semi-supervised learning). В этом случае разметку имеет не весь датасет, а только его часть, но неразмеченные данные также используются в процессе обучения. Этот метод широко используется в задачах классификации. Однако, для пиксельных задач: семантической сегментации, удаления шума, улучшение ночных фотографий и т.п., подходы применяемые в классификации не применимы.
Сегодня разберем статью, в которой автор предлагают SSL методику для решения пиксельных задач.
Введение
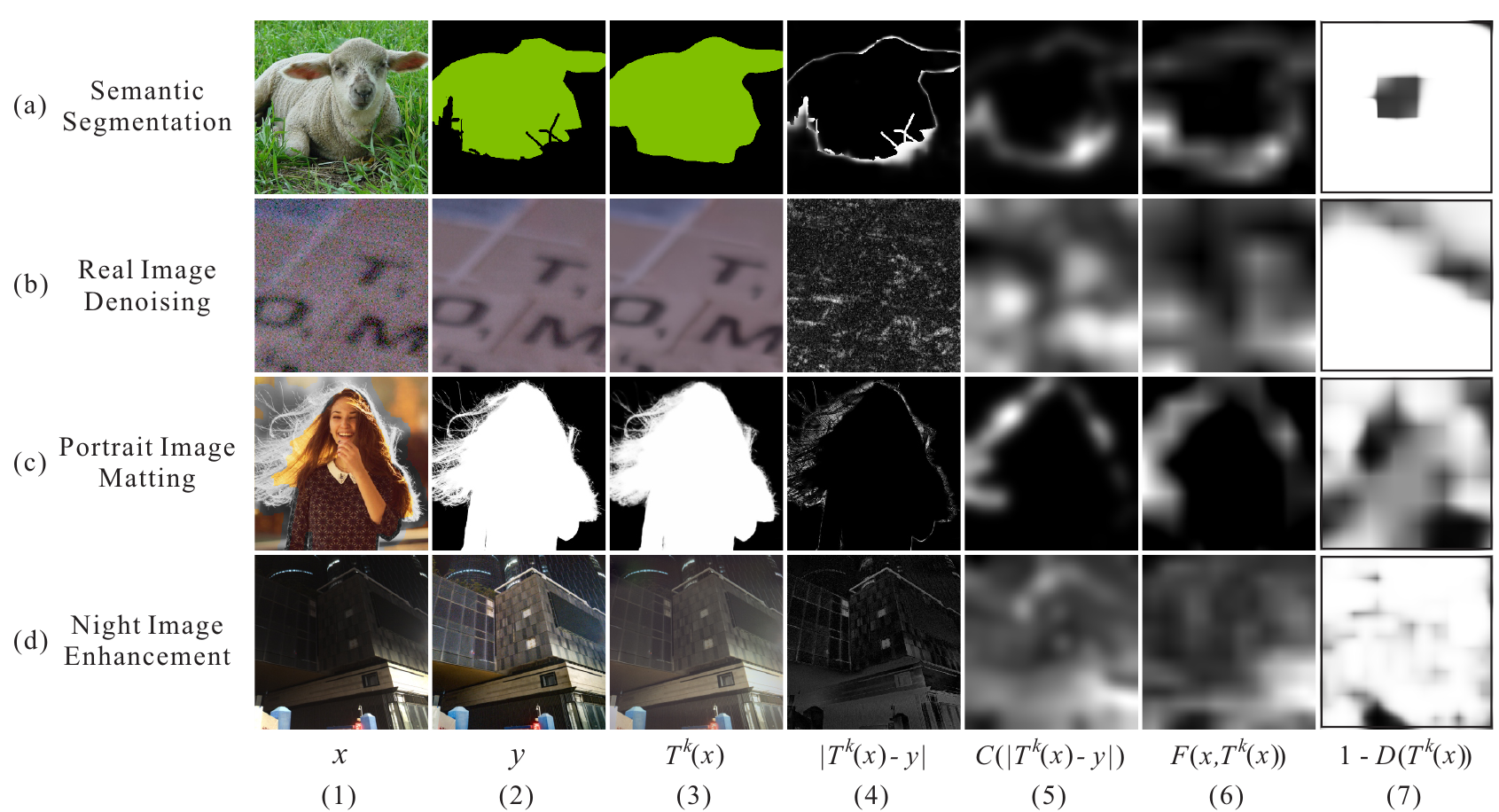
Итак авторы рассматривают несколько “пиксельных задач”: семантическая сегментация, отделение основного объекта на изображении от фона, удаление шума с изображения, улучшение ночных снимков (часть из них задачи пиксельной классификации, например, семантичекая сегментация, часть - регрессии). Для решения всех задач в рамках SSL авторы предлагают единую схему:
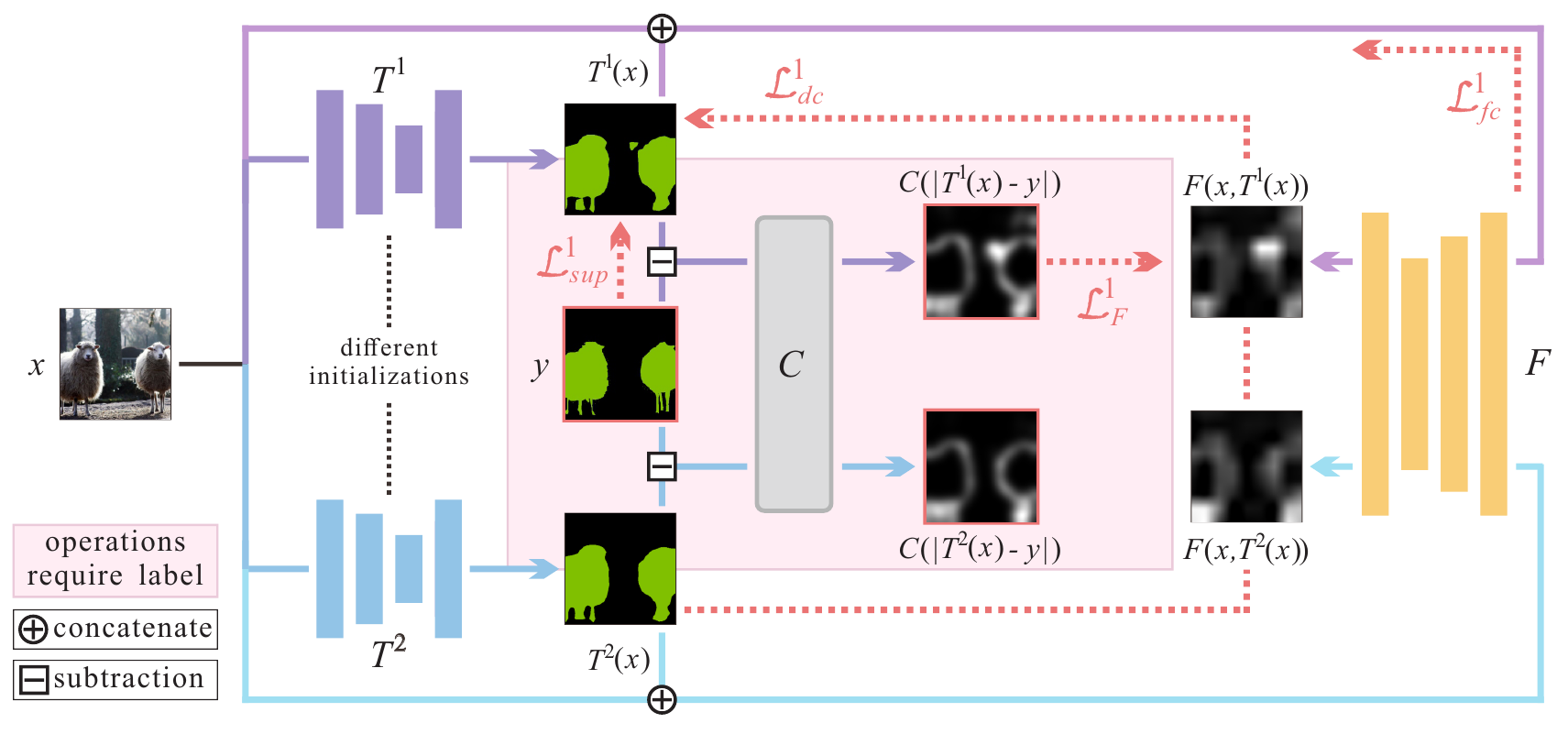
Разберемся подробнее. Итак у нас есть датасет ${\mathcal X} = {\mathcal X}_l \cup {\mathcal X}_u$, который состоит из двух частей: ${\mathcal X}_l$ - размеченной и ${\mathcal X}_u$ - неразмеченной. Возьмем две нейронных сети, которые решают нашу задачу: $T^{(1)}, T^{(2)}$, сетки могут иметь разную структуру (кол-во слоёв, кол-во каналов в слоях и т.п., для сегментации, например, можно в качестве $T^{(1)}$ взять DeepLab, а в качестве $T^{(2)}$ - UNet), а могут быть и одной и той же моделью, однако, в последнем случае крайне важно, чтобы начальная инициализация весов у этих двух сетей отличалась. Собственно, на этом различии строится вся дальнейшая схема (чем то это похоже на глубокое взаимное обучение, которое мы в своё время разбирали).
Итак у нас есть две сети, каждая из которых решает исходную задачу, т.е. преобразует изображение $T^{(k)}: {\mathbb R}^{H \times W \times 3} \rightarrow {\mathbb R}^{H \times W \times O}$. Здесь $O$ - размерность результата и зависит от задачи, для семантической сегментации $O$ - есть кол-во классов, а для задачи удаления шума на выходе получаем снова изображение и $O=3$.
В дополнении к этим двум сеткам авторы заводят третью сеть $F$ - дефектометр, которая для каждого пикселя определяет вероятность того, что отклик от сети $T^{(k)}$ в этом пикселе неправильный:
\[F: {\mathbb R}^{H \times W \times (O + 3)} \rightarrow [0, 1]^{H \times W \times 1}\]На вход дефектометра подаётся объединение (по последней размерности) исходного изображения и отклика от сети: $F(x, T^{(k)}(x))$, а сама функция $F$ - это просто свёрточная нейронная сеть из нескольких слоёв, часть из которых со страйдом большим 1, а заключительный слой - апскейл до размеров исходного изображения.
Далее схема тренировки похожа на тренировку GAN. На каждой итерации, мы делаем два шага тренировки:
-
Тренируем модели $T^{(k)}, k=1,2$ при фиксированном дефектометре $F$. На данном шаге мы используем и размеченную и неразмеченную части датасета.
-
Тренируем дефектометр $F$ при фиксированных $T^{(k)}, k=1,2$, используя только размеченную часть датасета.
Замечание: поскольку вначале тренировки дефектометр у нас выдаёт случайный отклик, то влияние штрафных функций основанных на отклике дефектометра вначале убирается коэффициентами в ноль и затем возрастает на более поздних итерациях.
Тренировка моделей
Для тренировки моделей $T^{(k)}, k=1,2$ используется следующая штрафная функция:
\[{\mathcal L}^{(k)}_T({\mathcal X}, {\mathcal Y}) = \sum_{<x_l, y>}{\mathcal L}^{(k)}_{sup}(x_l, y) + \sum_x\left(\lambda_{dc}\, {\mathcal L}^{(k)}_{dc}(x) + \lambda_{fc}\, {\mathcal L}^{(k)}_{fc}(x)\right)\]Первое слагаемое:
\[{\mathcal L}^{(k)}_{sup}(x_l, y) = \sum_{h,w,o}{\mathcal R}(T^{(k)}(x_l)^{(h,w,o)}, y^{(h,w,o)})\]считается на размеченной части датасета ($x_l, y$ - пара картинка-разметка). ${\mathcal R}(\cdot, \cdot)$ - штрафная метрика, которая зависит от того какую задачу решаем (например, для семантической сегментации это может быть кроссэнтропия, а для удаления шума MSE).
Второе слагаемое - динамическая согласованность моделей (Dynamic Consistency Constraint) опирается на отклик дефектометра:
\[{\mathcal L}^{(k)}_{dc}(x) = \frac 1 2 \sum_{h, w}\left(m_{dc}^{(k)}(x)^{(h,w)}\sum_{o}\left(T^{(k)}(x)^{(h, w, o)} - T^{(\tilde{k})}(x)^{(h, w, o)}\right)^2\right)\]здесь $\tilde{k}$ это дополнительная для $k$-ой модели, т.е. $\tilde{k} = 1$, если $k = 2$ и $\tilde{k} = 2$, если $k = 1$. $k$-ая модель штрафуется здесь в тех пикселях, где дефектометр считает, что она ошиблась сильнее своей товарки:
\[m_{dc}^{(k)}(x)^{(h,w)} = \left\{\begin{matrix} 1, & \hat F\left(x, T^{(k)}(x)\right)^{(h, w)} > \hat F\left(x, T^{(\tilde{k})}(x)\right)^{(h, w)}\\ 0, & \hat F\left(x, T^{(k)}(x)\right)^{(h, w)} \leq \hat F\left(x, T^{(\tilde{k})}(x)\right)^{(h, w)} \end{matrix}\right.\]здесь вместо непосредственно дефектометра $F$ используется:
\[\hat F(x, T^{(k)})^{(h,w)} = \left\{\begin{matrix} F(x, T^{(k)})^{(h,w)}, & F(x, T^{(k)})^{(h,w)} < \xi \\ 1, & F(x, T^{(k)})^{(h,w)} \geq \xi \end{matrix}\right.\]чтобы не штрафовать модели в тех пикселях, где они обе сильно ошиблись ($\xi$ - порог, который выбирается в зависимости от задачи).
Наконец, последнее слагаемое штрафует там, где обе модели выдали плохой, с точки зрения дефектометра отклик:
\[{\mathcal L}_{fc}^{(k)}(x) = \frac 1 2 \sum_{h, w}\left(m_{fc}(x)^{(h,w)}\left(F(x, T^{(k)}(x))^{(h, w)} - 0\right)^2\right)\] \[m_{fc}(x)^{(h,w)} = \left\{\begin{matrix} 1, & F\left(x, T^{(1)}(x)\right)^{(h, w)} > \xi\, {\rm AND}\, F\left(x, T^{(2)}(x)\right)^{(h, w)} > \xi\\ 0, & F\left(x, T^{(1)}(x)\right)^{(h, w)} \leq \xi\, {\rm OR}\, F\left(x, T^{(2)}(x)\right)^{(h, w)} \leq \xi \end{matrix}\right.\]стараясь сделать так, чтобы модель удовлетворила дефектометр.
Тренировка дефектометра
Дефектометр тренируется на размеченной части датасета. Мы фиксируем обе модели $T^{(k)}, k=1,2$ и используем штрафную функцию:
\[{\mathcal L}^{(k)}_F({\mathcal X}_l, {\mathcal Y}) = \sum_{<x_l, y>}\left(\frac 1 2 \sum_{h,w}\left(F(x_l,T^k(x_l))^{(h, w)} - C(|T^k(x_l) - y|)^{(h,w)}\right)^2 \right)\]В качестве ground truth можно было бы использовать просто ошибку модели, т.е. $|T^k(x_l) - y|$ (возможно усредненную по каналам и нормализованную, поскольку дефектометр должен выдавать вероятность, т.е. значения из отрезка $[0, 1]$ для каждого пикселя изображения), но авторы считают, что лучше подвергнуть этот тензор дополнительным преобразованиям, которые сгладят исходную разность.
$C(\cdot)$ - берет усредненный по каналам модуль разности $|T^k(x_l) - y|$ и применяет последовательно несколько фильтров блюра и дилейта, в заключении нормализуя результат преобразований.
Для понимания картинка из статьи:
Результаты
Авторы проверили свой фреймворк на нескольких задачах. Мне наиболее интересна задача семантической сегментации. Для нее авторы взяли датасет Pascal VOC 2012 добавили Segmentation Boundaries Dataset и использовали модель DeepLab-v2. Одновременно, они тренировали пару таких моделей с дефектометром в рамках своего подхода и отдельно модель саму по себе. Пробовали они это делать, оставив размеченной $1 / 16$, $1 / 8$, $1 / 4$, $1 / 2$ части датасета. Во всех случаях использование описанного в статье подхода дало прирост качества порядка $3$%, кроме случая, когда оставили разметку на половине датасета, в этом случае прирост был около $1.5$%, т.е. качество в любом случае возрастает.
Забавно, что в случае, когда оставили только четверть разметки, использования SSL подхода выдаёт качество выше, чем тренировка без SSL на датасете с половиной разметки.
Вывод
Крайне познавательная статья, надо будет попробовать на своих задачах.